

17/03/2022
Door Lilian Vermeer
Een team wetenschappers van het Max Planck Instituut en de Universiteit van Californië hebben een robotpoot (Birdbot) geconstrueerd die zeer energie-efficiënt is, net als zijn natuurlijke model, een poot van een loopvogel.
De onderzoekers keken voor de ontwikkeling van de robotpoot vooral naar loopvogels zoals struisvogels. Struisvogels, waarvan sommige meer dan 100 kg wegen, rennen met snelheden tot 55 km/u. Men denkt dat de uitstekende locomotorische prestaties van struisvogels mogelijk worden gemaakt door de pootstructuur van het dier. De onderzoeksgroep van Alexander Badri-Spröwitz van het Max Planck Instituut voor Intelligente Systemen heeft als belangrijkste aandachtsgebied de dynamische voortbeweging van dieren en robots. Ze werken op het raakvlak tussen biologie en robotica op het gebied van biomechanica en neurocontrole.
Een veerkrachtig netwerk van spieren en pezen
Bij het lopen trekken mensen hun voeten op en buigen hun knieën, maar voeten en tenen wijzen bijna onveranderd naar voren. Vogels doen dat anders - in de zwaaifase vouwen zij hun voeten naar achteren. Maar wat is de functie van deze beweging? Badri-Spröwitz en zijn team schrijven deze beweging toe aan een mechanische koppeling. "Het is niet het zenuwstelsel, het zijn geen elektrische impulsen, het is geen spieractiviteit," legt Badri-Spröwitz uit. "Wij stelden een nieuwe functie van de koppeling tussen voet en been voor via een netwerk van spieren en pezen dat zich over meerdere gewrichten uitstrekt". Deze meervoudig gewrichtsspieren-pezen coördineren de voetplooi in de zwaaifase. In onze robot hebben we de gekoppelde mechanica in het been en de voet geïmplementeerd, wat energie-efficiënt en robuust robotlopen mogelijk maakt. Onze resultaten die dit mechanisme in een robot aantonen, maakt het aannemelijk dat soortgelijke efficiëntievoordelen ook gelden voor vogels," legt hij uit.
Veer- en kabelmechanisme
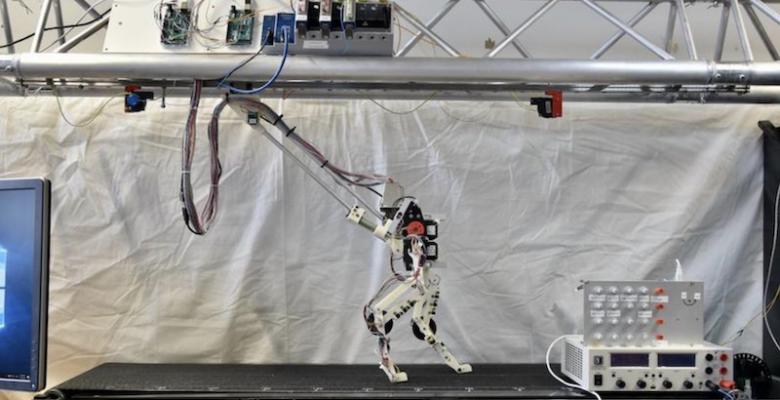
De onderzoekers bouwden een kunstmatige vogelpoot waarbij de voet geen motor heeft maar een gewricht dat is uitgerust met een veer- en kabelmechanisme. De voet is mechanisch gekoppeld aan de rest van de pootgewrichten via kabels en katrollen. Elke poot bevat slechts twee motoren - de motor van de heupgewrichten, die de poot heen en weer zwaait, en een kleine motor die het kniegewricht buigt om de poot omhoog te trekken. "De voet- en beengewrichten hoeven niet te worden geactiveerd in de standfase," zegt onderzoeker Aghamaleki Sarvestani. "Veren drijven deze gewrichten aan, en het multi-gewrichts veer-pees mechanisme coördineert de gewrichtsbewegingen. Wanneer de poot in de zwaaifase wordt getrokken, ontkoppelt de voet de veer van de poot - of de spier-peesveer, zoals wij denken dat het bij dieren gebeurt," voegt Badri-Spröwitz toe. Een video laat zien hoe BirdBot in het laboratorium van de onderzoeksgroep loopt.
Nul inspanning bij het staan
Bij het staan verbruikt de poot geen energie. "Voorheen moesten onze robots tegen de veer of met een motor werken bij het staan of bij het omhoog trekken van het been, om te voorkomen dat het been tijdens het zwaaien van het been tegen de grond zou botsen. Deze energie-input is niet nodig bij de poten van BirdBot," zegt Badri-Spröwitz en Aghamaleki Sarvestani voegt daaraan toe: "In totaal heeft de nieuwe robot slechts een kwart van de energie van zijn voorganger nodig."
Theoretisch zouden nu metershoge poten kunnen worden geconstrueerd om robots met een gewicht van enkele tonnen te dragen, op een energie-efficiënte manier. Op 16 maart publiceerden de onderzoekers hun resultaten in Science Robotics.
Bekijk het filmpje over de Birdbot.
Foto: Birdbot op een loopband (Alexander Badri-Spröwitz DLG Group at MPI-IS)