
15/02/2021
Door Ad Spijkers
Nanowetenschappers uit Chemnitz en Dresden ontwikkelen adaptieve micro-elektronica die onafhankelijk beweegt op basis van sensordata en zich kan richten op specifieke activiteiten.
Flexibele en adaptieve micro-elektronica wordt gezien als een drijvende kracht achter innovatie voor nieuwe en effectievere biomedische toepassingen. Daarbij is nauw contact tussen de elektronica en het zenuwweefsel essentieel voor een effectieve elektrische en mechanische koppeling. Een team aan het Leibniz-Institut für Festkörper- und Werkstoffforschung (IFW) in Dresden en de Technische Universität Chemnitz kon aantonen, dat zulke adaptieve micro-elektronica door analyse van sensorsignalen kan worden gepositioneerd, op een gecontroleerde manier biologisch weefsel kan manipuleren en kan reageren op zijn omgeving.
Adaptieve en intelligente micro-elektronica
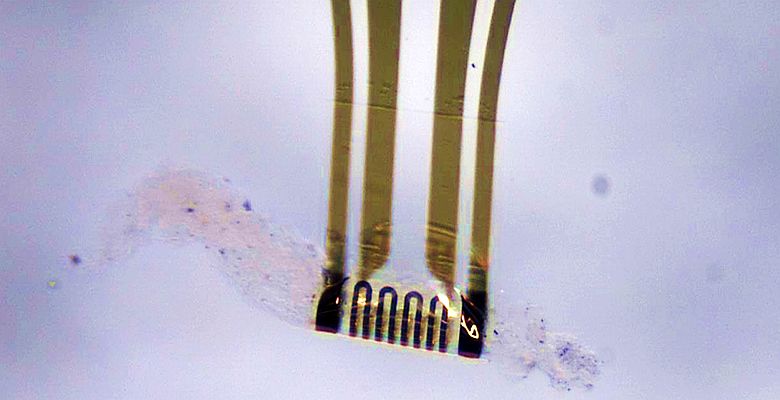
De basis voor de nieuwe toepassingen is een polymeerfilm die slechts 0,5 mm breed en 0,35 mm lang is en als drager fungeert voor de micro-elektronische componenten. De onderzoekers ontwikkelden adaptieve en intelligente micro-elektronica, die op een doelgerichte manier wordt vervormd met behulp van microscopisch kleine kunstmatige spieren en zich dankzij sensoren aanpast aan dynamische omgevingen.
Daartoe worden de sensorsignalen via elektrische verbindingen naar een microcontroller gestuurd, waar ze worden geëvalueerd en gebruikt om stuursignalen voor de kunstspieren te genereren. Hierdoor kunnen deze miniatuurgereedschappen zich bijvoorbeeld aanpassen aan complexe en onvoorspelbare anatomische vormen. Zenuwbundels hebben bijvoorbeeld altijd verschillende maten. Adaptieve micro-elektronica maakt het mogelijk om deze zenuwbundels voorzichtig te omsluiten om een geschikte bionurale interface tot stand te brengen.
De integratie van vorm- of positiesensoren in combinatie met microactuatoren is hiervoor essentieel. Idealiter wordt de adaptieve micro-elektronica daarom geproduceerd in een monolithisch waferschaalproces.
Kunstmatige spieren
De beweging en vervorming van de adaptieve micro-elektronica vindt plaats door middel van kunstmatige spieren (actuatoren). Deze wekken beweging op door de uitstoot of opname van ionen en kunnen zo bijvoorbeeld de polymeerfilm vervormen. Dit proces is gebaseerd op het gebruik van het polymeer polypyrrool (PPy).
Het voordeel van deze methode is dat de vorm gericht en met een zeer lage voorspanning (minder dan 1 V) kan worden gemanipuleerd. In het verleden is al aangetoond dat kunstmatige spieren veilig zijn voor gebruik in organische omgevingen. De prestaties van de micromachines zijn getest in verschillende omgevingen die relevant zijn voor medische toepassingen, waaronder cerebrale vloeistof, bloed, plasma en urine.
Micro-elektronische robots
De ontwikkelaars verwachten dat adaptieve en intelligente micro-elektronica op middellange termijn zal worden ontwikkeld tot complexe robotachtige microsystemen. De volgende stap is de overgang van de voorheen platte architectuur naar driedimensionale micro-robots. Eerder werk toonde aan hoe platte polymeerfilms worden getransformeerd in driedimensionale structuren door zelfgeorganiseerd vouwen of rollen. De onderzoekers zullen dergelijke materialen voorzien van adaptieve elektronica om systemen te ontwikkelen zoals gerobotiseerde microkatheters, kleine robotarmen en kneedbare neurale implantaten die semi-autonoom werken volgens digitale instructies.
Voor zulke complexe microrobots is een groot aantal individuele actuatoren en sensoren nodig. Het is een uitdaging om elektronische componenten effectief te kunnen huisvesten en gebruiken in een dergelijke dichtheid, omdat er meer elektrische aansluitingen nodig zijn dan er ruimte is. Dit wordt opgelost door complexe elektronische schakelingen die in de toekomst zullen worden geïntegreerd in de adaptieve micro-elektronica om de juiste instructies door te geven aan de juiste componenten.
Foto: IFW Dresden/TU Chemnitz