
10/07/2018
Door Ad Spijkers
Om hun concurrentievermogen te behouden, moeten fabrikanten hoogwaardige producten tegen lage prijzen aanbieden. Drie Fraunhofer-instituten werken aan een nieuwe generatie industriële robots die goedkope productieprocessen mogelijk maken.
Centraal staat de ontwikkeling van een nieuwe freeskinematica voor het bewerken van lichte constructiematerialen, metalen en staalsoorten. Het doel is een productietolerantie van 0,1 mm binnen de totale werkruimte vanaf het eerste onderdeel.
Voor verspanende bewerkingen worden nauwkeurig werkende gereedschapmachines gebruikt. Conventionele industriële robots kunnen deze machines door hun mindere nauwkeurigheid tot nu toe niet vervangen. Met name het frezen met robots is nog een grote uitdaging; de lage systeemstijfheden beperken de toepassing. Voor de verspanende bewerking van lichte constructiematerialen zoals aluminium en met koolstofvezel versterkte kunststoffen (KVK), maar ook van metalen en staalsoorten, moeten echter met laagste productietoleranties worden gegarandeerd.
Seriegrootte 1
In het gecombineerde Fraunhofer-project Flexmatik 4.1 ontwikkelen de Fraunhofer-Instuten für Produktionsanlagen und Konstruktionstechnik (IPK), für Fertigungstechnik und Angewandte Materialforschung (IFAM) en für Betriebsfestigkeit und Systemzuverlässigkeit (LBF) een robot die ook lichte constructiematerialen nauwkeurig moet kunnen frezen. Hiervoor moet de kinematica fundamenteel worden veranderd.
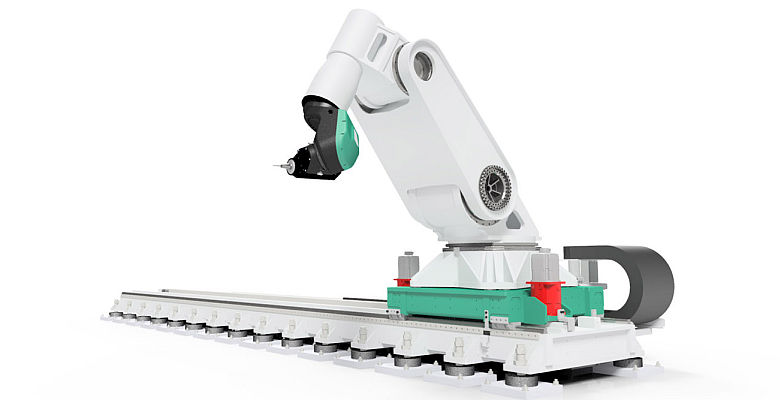
De onderzoekers ontwikkelen een meerassige kinematica, speciaal voor baanprocessen. Daarbij rijdt de robot over lineaire eenheden van punt A naar punt B langs het te bewerken onderdeel. De onderzoekers verwachten op basis van een systeemsimulatie dat ze de gewenste nauwkeurigheid van +/- 0,1 mm zullen realiseren. Dit lukt al vanaf het eerste onderdeel tijdens de bewerking, ondanks de inwerkende proceskrachten. Daarmee is volgens de onderzoekers geïndividualiseerde productie tot seriegrootte 1 mogelijk.
Directe aandrijving
Om de hoge nauwkeurigheid te realiseren, ontwikkelt het team onderzoekers een nieuw aandrijfconcept voor de afzonderlijke assen. Ze gaan uit van directe aandrijvingen die tijdens bedrijf duidelijker stijver zijn dan de gangbare overbrengingen. Dankzij een nieuw klimatiseringsconcept kunnen ze bovendien door de temperatuur veroorzaakte onnauwkeurigheden minimaliseren. De robot wordt voorzien van een besturing voor een gereedschapmachine. De Flexmatik wordt gecompleteerd door een actief systeem, dat trillingen van het gereedschap compenseert.
Het voordeel van de nieuwe robots tegenover gereedschapmachines is, dat de aanschafkosten tot een factor tien lager en het energieverbruik een factor vijftien lager zijn. Door de lineaire eenheid heeft de Flexmatik een bereik dat vergelijkbaar is met dat van grote portaalfreesmachines maar tegelijkertijd beter toegankelijk is. Anders dan portaalfreesmachines heeft de Flexmatik geen speciale fundering nodig, wat een flexibele opstelling mogelijk maakt en hoge bouwkosten voorkomt. De onderzoekers willen eind dit jaar een functioneel prototype gereed hebben.
Het toepassingsgebied van de innovatieve freesrobot is breed. Dat gaat van het bewerken van grote structuren uit KVK zoals vliegtuigrompen via het frezen van onderdelen van gasturbines tot het reviseren van persmallen. Het gaat er echter niet om gereedschapmachines te vervangen, maar om die op zinvolle wijze aan te vullen en te ontlasten.
(foto: Fraunhofer IFAM)