

29/07/2016
Door Ad Spijkers
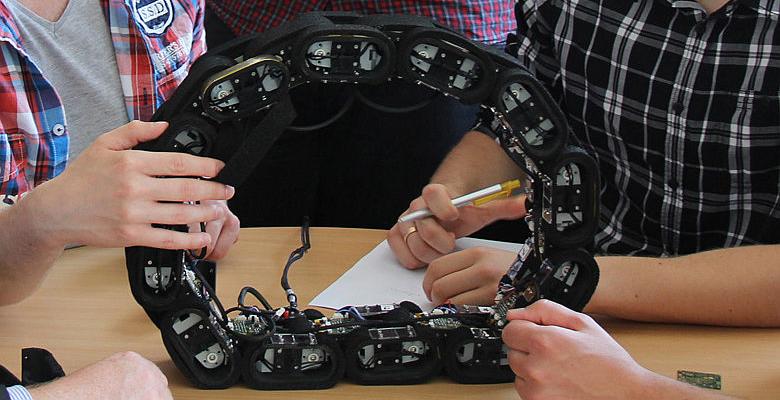
Hij lijkt op een fietsketting, heeft twaalf schakels en in elke schakel een aandrijving. Zo kan men ongeveer de robot beschrijven die vier bachelor-studenten technische informatica van de Fachhochschule Bielefeld hebben ontwikkeld.
In tegenstelling tot vergelijkbare robots zijn de kettingsegmenten voorzien van druksensoren, zodat het ‘Ourobot’ gedoopte apparaat ook hindernissen kan overwinnen. De naam is afgeleid van een zichzelf verslindende slang, de Ouroboros.
Momenteel kan de Ourobot alleen rechtuit bewogen en nog geen bochten maken, maar dankzij de sensoren herkent hij wel hindernissen en kan bijvoorbeeld over een boek heen rollen. Het regelconcept erachter, het samenspel van de afzonderlijke schakels bij het overwinnen van hindernissen, is een complexe mathematische opgave en dat hebben de studenten bewonderenswaardig opgelost.
Haalbaarheidsstudie
Een concrete toepassing is er nog niet voor de Ourobot. Het gaat hier eerder om een haalbaarheidsstudie, fundamenteel onderzoek dus. Ook dat is opvallend, omdat de bachelor-studies aan de Fachhochschule van oudsher vooral toepassingsgeoriënteerd zijn. Dit sluit een onderzoeksoriëntatie echter niet uit en wordt zelfs aangemoedigd. De samenwerking met de Universität Bielefeld komt tot uiting in de masterstudie Biomechatronica die door beide onderwijsinstellingen gezamenlijk wordt aangeboden.
Het project Ourobot is nog lang niet afgesloten, er wordt nog steeds aan gewerkt. De begeleiders willen met de nu nog tweedimensionaal werkende robot ‘de derde dimensie betreden’, zoals ze het zelf uitdrukken. Ze willen een actief deformeerbare robot ontwikkelen die zich net als een amoebe kan aanpassen aan de omgeving, zich uitrekt en weer krimpt (een amoebe is een doorgaans eencellig organisme dat van vorm kunnen veranderen door het uitsteken en intrekken van schijnvoetjes). Hierdoor zou de Ourobot zich door een nauw terrein kunnen bewegen en hindernissen via verschillende bewegingen kunnen overwinnen.
Voor de 3D-versie van de Ourobots zijn al verschillende bewegingsvarianten ontworpen, die lijken op die van een kogel of een slang. Maar hier is nog wel wat ontwikkelwerk te doen.