
02/02/2015
Door Bart Driessen
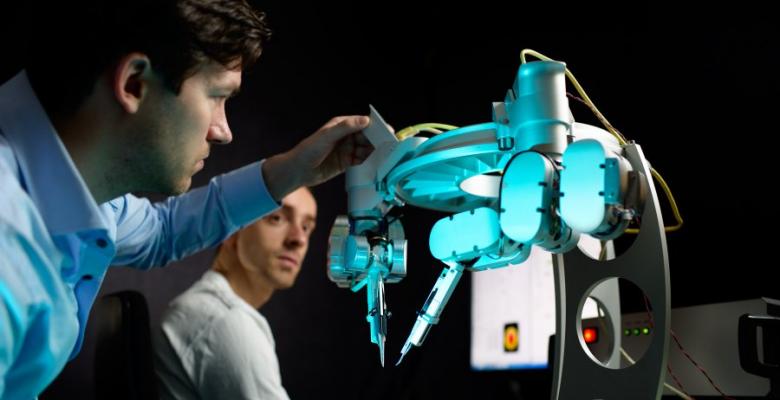
Tijdens de EtherCAT-dagen in Eindhoven en Rijssen presenteerde de Eindhovense start-up de Microsure. De Microsure is een robot die microchirurgen helpt met het hechten van bloedvaten met een diameter van nog geen millimeter. Probeer dan maar eens je handen stil te houden.
Ferry Schoenmakers, in Eindhoven afgestudeerd werktuigbouwkundige, werkt nu al twee jaar binnen een team van de TU aan de ontwikkeling van de Microsure. Het project wordt ondersteund door STW, SRE, TUe en het Academisch Ziekenhuis Maastricht. Raimondo Cau is vorig jaar op grond van zijn bijdrage aan dit project bij prof. Maarten Steinbuch gepromoveerd. Momenteel is Schoenmakers bezig met de verdere verfijning van het tweede prototype dat geschikt moet zijn voor het doen van proeven op dieren. Daarna volgt nog prototype nummer 3 voor beproevingen op mensen. Schoenmakers verwacht dat het nog zeker drie jaar zal duren eer dat de Microsure klaar is voor de markt. “De uitdaging die deze hulprobot aangaat is microchirurgen te helpen bij operaties en hechtingen in het millimeterbereik. Als je door de microscoop kijkt, zie je al snel dat kleine bewegingen van de hand, en dus ook van chirurgische gereedschappen, onvermijdelijk zijn. ‘Trillen of bibberen’ is misschien overdreven, maar echt stil is het in geen geval. Sowieso moet elke chirurg beschikken over een vaste hand, maar wanneer in bloedvaten, niet groter dan een millimeter, gesneden moet worden, zijn er maar enkele specialisten die dit echt kunnen. De chirurg moet ook hechtingen aanbrengen met de diameter van een menselijk haar. Het is enorm inspannend werk; alleen jongere chirurgen kunnen dat aan. Vandaar dat er een groot tekort is aan microchirurgen.”
Oplossing
De oplossing van de Microsure is een schoolvoorbeeld van mechatronica. Een combinatie van mechanica, aandrijftechniek, elektronica en software maakt het mogelijk de onvermijdelijke bewegingen van de menselijke hand te reduceren tot een acceptabel minimum. Schoenmakers heeft het in dat geval over ‘filteren’. In hoofdlijnen bedient de chirurg de Microsure met joysticks en een voetpedaal. De bewegingen daarvan worden door een samenspel van soft- en hardware vertaald in bewegingen die vijf maal zo precies zijn. Met de voetpedaal kan de chirurg de vertraging bepalen. In plaats van direct eigenhandig te snijden wordt de operatie dus met elektrisch aangedreven ‘armen en handjes’ uitgevoerd. De chirurg kan dan alles via een microscoop volgen en zien hoe de chirurgische gereedschappen bij de patiënt hun werk doen.
Datacommunicatie
Voor de datacommunicatie hebben de mensen van Microsure gekozen voor EtherCAT. De reden hiervoor is de eis van een real-time datacommunicatie en stabiele feedback tussen de industriële PC van Beckhoff en verschillende apparaten. Gebruik van EtherCAT maakt het ook mogelijk de bekabeling van IO minimaal te houden. Daarnaast maakt EtherCAT het makkelijk om het aantal armen uit te breiden tot vier stuks. Een ander argument ten gunste van EtherCAT heeft te maken met de ontwikkeling van de besturing. Microsure gebruikt hiervoor Matlab/Simulink. Vanuit het Simulink model wordt direct C-code gegenereerd die door de Beckhoff PC wordt uitgevoerd. Voor de aansturing van bepaalde actuators maakt Microsure gebruik van klantspecifieke printjes.
Foto: Bart van Overbeeke